Here we have all of my cogs cut out and spaced so that they are transfer torque to one another.
From this point I took the distances between each cog and rearranged them into a more dynamic pattern, and began to work on building the encasement. The material I had on had for the clear case was only .05" thick, which meant I got to play with hand routing (or dremeling) a dado out of my pine frame. much fun and sawdust was had by all.

| 
|
Along the way I checked that all the alignment was properly spaced so that the cogs would spin freely when attached to the gear motor.
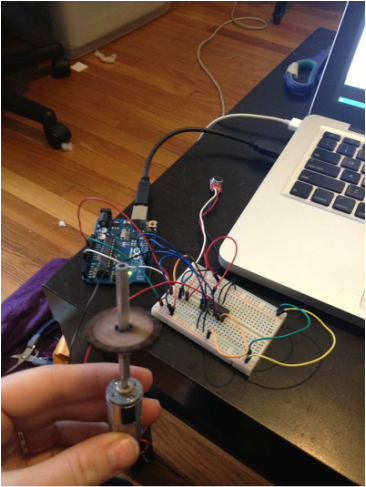
On the other side of things I wanted to have my arduino trigger the start of the motor movement through sound. Here's a test of sound triggering a temporary servo motor.
From there I switched over to a gear motor and an h bridge for more torque.
 RSS Feed
RSS Feed
